�µIJ������������/�������������ϵͳ���
����:Tom Hopkins
�����ܼ�
�ⷨ�뵼�壨��ķ������������
��������ŵ˹��ķ��
ժҪ
�ִ������������ϵͳͨ��ʹ�ü��ɵ�·����оƬ���������ת����ʱ���ܻ��Ἧ��һЩ�Ŀ��ƹ��ܣ���������ơ���Щ���Ƚ��Ŀ���оƬ������һ��״̬�����Բ�������IJ���˳�������Ӧ�Ŀ��ơ�һ����ԣ�����ʱ����˶���������һ���ⲿ��������ר�õ�ASIC����·���Ƶġ������Ҫ���ƶ�̨���������취���Ǹ�ÿ̨�����װר������·�������������ϰ�װÿ̨����Ŀ���������ͨ����һ��оƬ�ϼ���һ�����ֿ����ں˺�������·���ⷨ�뵼����²�Ʒ L6470�ɼ�������ϵͳ����ơ������IC���õ�ѹ����ģʽ���ܹ���1/128���������û����õ��˶����ߣ�������Щ���������������ĸ���Ӱ���������ڲ��øÿ�������ϵͳ�У���Ϊ������ֻ����������������˶��������ֻ��һ���������������ɹ�����̨�����
ǰ��
�ⷨ�뵼�����Ƴ��IJ����������оƬL6470��һ��оƬ�ϼ����˹��ʼ���һ�����ֿ����ںˡ������������оƬ�ܹ�ͨ��SPI�ӿڽ������������˶������������Ԥ�Ƶļ��ٶȺ��ٶ������Զ�ִ���˶��������Զ��ӿ�������ת�ٶȣ���ʹ֮����Ԥ���ת�١�
�ÿ������Ľṹ��ͼ1��ʾ����������·��һ���������õ�״̬�����ܹ����ղ�������ֲ��������磺���ٶȡ����ٶȡ�����ת�١�ת�١���������� (PWM)�Ͳ���ģʽ����ȫ������1/128�������ÿ�������֧��8�ֲ���ģʽ���ڲ�����λ�ü��������������ѡ����ģʽ�IJ��������������������൱�ڸò���ģʽ�ķֱ��ʸ��ٵ��ת��λ�á�ÿ����ת1.8 �ȣ�1/128�����ת����תһ��Ȧ��λ�ü��������Զ�����25600��128 �� 200������
���е��˶������������ͨ��SPI�ӿ��͵�����������������·�������ǰ���������˶�������Ƶ���Ӿ�ֹ��ʼ��������ת�ٷ��ص�ֹͣ״̬����IJ���ʱ��Ͳ��������ͬʱִ�������еIJ�����������оƬ���ܸ���Щ�˶������ŶӺͷ��ͣ����и��ӵ��˶����ƣ��Ӷ��ܹ���������������Ŀ�����
ͼ1: �ṹ��ͼ
�˶���λ������
�����ں˿�ִ�������˶������4��ֹͣ����:
Run (Direction, Speed) ������תֱ���ӵ�ֹͣ����Ϊֹ
Move (Direction, N_Steps) ��������˶�N��
GoTo (Position) �ؽ�ֱ��·���˶�������λ��
GoTo (Direction, Position) ��ָ����˶�������λ��
GoUntil (Act, Direction, Speed) ������תֱ�����ⲿ�¼�����Ϊֹ
SoftStop ����ֱ��ֹͣ
Hard Stop �����ƶ������ٹ��̣�
SoftHiZ ���ٵ�ֹͣ��Ȼ��رյ���
HardHiZ �����ƶ������رյ���
�ڿ�ʼ�κ��˶�֮ǰ��ͨ��SIP�ӿ�ʹ��SetParam����������ת�������ϵ�ת�١��ϸ�ת�١����ٶȡ����ٶ��Լ������˶�����ֵ��Ϊȷ���˶��������ԣ��ڵ���˶������У��˶����ߵĺܶ����ֵ�������ģ�ֻ���ڵ�����ƶ�����ܸ�����Щ������
ͼ2��ʾ��Move�����һ�������˶����ߡ������յ�һ�� Move����ʱ�����������������Ӿ�ֹ��ʼ��������ת�ٷ��ص���ʼλ������IJ���N���˶����ߣ��������̶����������ں�Ӳ��������ɵġ�
GoTo����ָʾ�����������ڲ�22λ����λ�ü���������ֵ���������ת��һ���ض�λ�á� GoTo�����Ϊ���֣�һ�����ض�������ת����һ�����ؽ�ֱ��·����ת����ȷ���Խ��ٲ����ﵽ����λ�õ��˶�������ÿ����ת1.8�ȵ�1/128���綯����22λ�������Ľ������൱�ڵ����ת��Լ164�ܡ�������ּ��ٱȺܴ���Ч��������Ȼ��λ�ü������ķ�Χ�ڡ�GoTo������˶����߿�������Move����������ͬ��������һ�㲻ͬ����GoTo�����У��ﵽ����ָ���ľ���λ�����貽�����Զ���������
Run��GoUntil��������ʹ�綯�����ֺ�����ת��ֱ���ӵ�һ���ƶ����� (������Run����)�������ⲿ�¼�����(������GoUntil)Ϊֹ�������յ�һ���ƶ�����ʱ��������ִ���������ֲ���֮һ�������ƶ�������ƶ�������������ִ�н����ƶ������ֹͣ��Ȼ���ṩ��̬�����
ͼ 2:�����˶�����
��ͼ3��ʾ��ʹ��һϵ��Run�������ִ�и��ӵ��˶���ÿ�ӵ�һ���µ�Run�������������������������ٻ������ת��������ָ����λ�ã�����ָ���ٶȱ�����ת��ֱ�����յ���һ��Run�����һ��Stop����Ϊֹ�������յ�һ��������ת����ʱ����������ϵ��ٶȣ�Ȼ�������෴���������ת��
ͼ 3:����Run�����ʵ�ָ����˶���
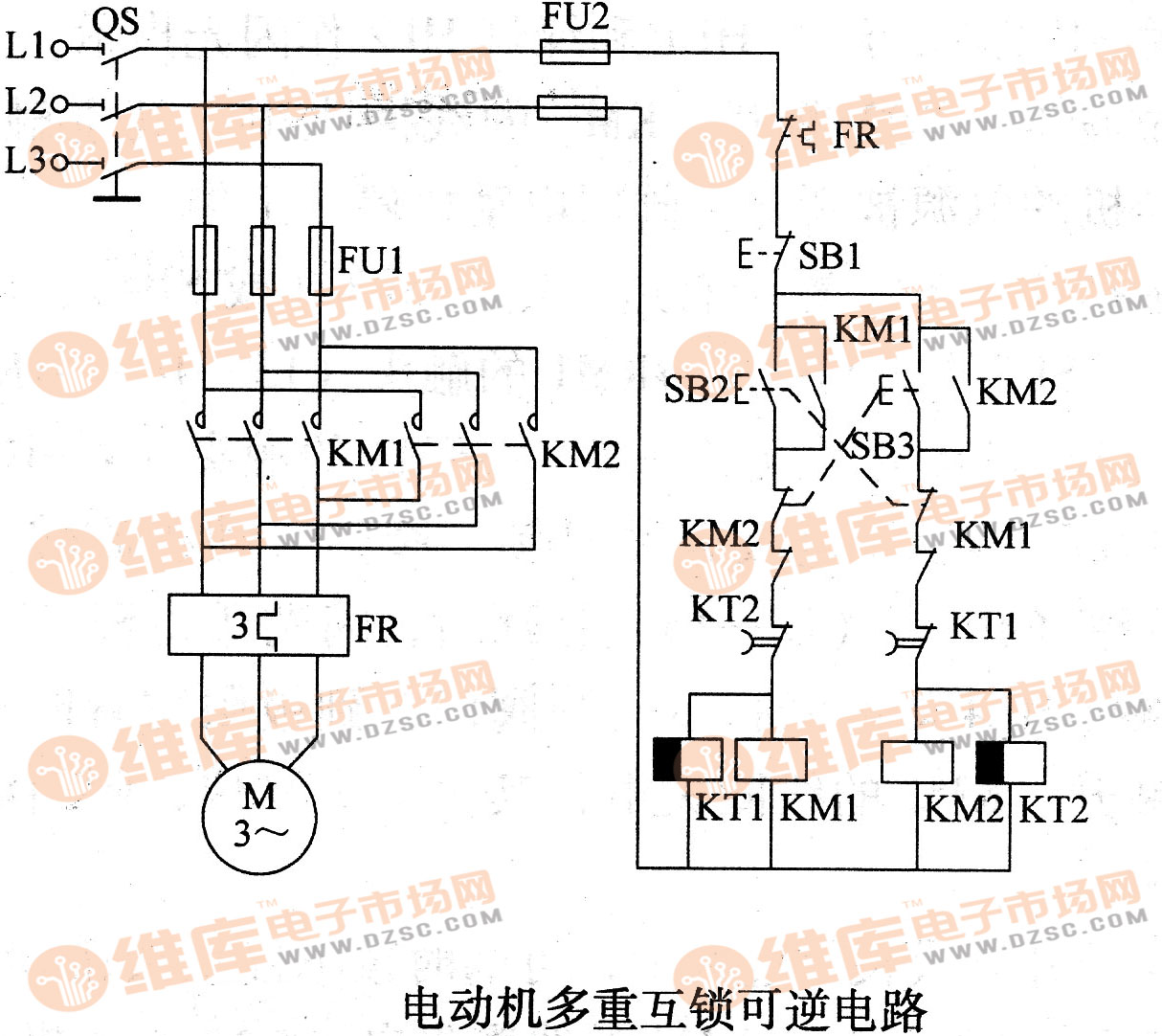
��ѹ����ʽ����
ͨ������£��������������·�ǵ���ʽ������ƣ�������������Ⲣ�����������ǿ�ȡ����ֽṹ�������Ա�ܹ��ڿ�ת�ٷ�Χ�ڱ��������ת�أ����ҵ�Դ��ѹ������С��������Ʒdz��ʺ�ȫ���Ͱ벽������������Ҳ����ʵ�֡��ܶ������Ա������������������ʹ�õ�ѹ���Ʒ�ʽ����Ϊ��Դ��ѹ�仯���·����кܴ�仯�����ң�����ת����ߣ�����ķ��綯�ƣ�EMF ��Ҳ����ǿ���������������ֿ��Ƽ�������������Щ�������ء�
Ϊʵ�����ֵ�ѹ����ʽ������·����Ҫ����һ��PWM������/��ʱ����·��������������������ַ�ʽ�������ռ�ձȡ�L6470ͨ���ڵ��������ʩ�ӵ�ѹ���������������Ȼ����ֱ�ӿ���������ķ��ȣ����ǣ�����������ѹ�Ĵ�С�����ء�ת�ء������ѧ���Ժ�ת��������ء���Ч�����ѹ������Դ��ѹ��KVALϵ���Ļ������ȡ�KVAL��ȡֵ��Χ�ǵ�Դ��ѹ��0%��100%���������������У�����ϴ�ֵ�ٳ��Ե���ָ�����ɲ�����ѡ���������Ҳ�����ֵ��ѹ������Ĺ�ʽ�ó���
VOUT = VS ⋅KVAL
KVALֵ������Ĺ�ʽ�ó���
KVAL = (Ipk x R)/Vs
����:
Ipk = ����ķ���
Vs = ���͵�Դ��ѹ
R = ����������
�������ļĴ���֧�ּ��ٶȡ����ٶȡ�������ת�ͱ���λ�õȲ�ͬ�� KVAL���ã����˶�����ÿ����������ʵ�ֲ�ͬ��ת�����á�
BEMF����
���������ת�ٷ�Χ��ʼ������������ͬ�ķ�ֵ��ѹ�����ŵ��ת�����ӣ�����ǿ�Ȼ����ͣ���Ϊ����ķ��綯��BEMF����������ʩ�ӵ���Ȧ�ϵĵ�ѹ��ͼ4��ߵIJ���������û�в���BEMF���������ĵ������״������ͼ�в��ѿ��������ŵ��ת�����ӣ�BEM�����Է�ʽ��ߣ���Ϊ��Ȧ�ϵĵ�ѹ��ʵ��ʩ�ӵ����ѹ��BEMF��ѹ�IJ�ֵ�����Ե������ή�͡�
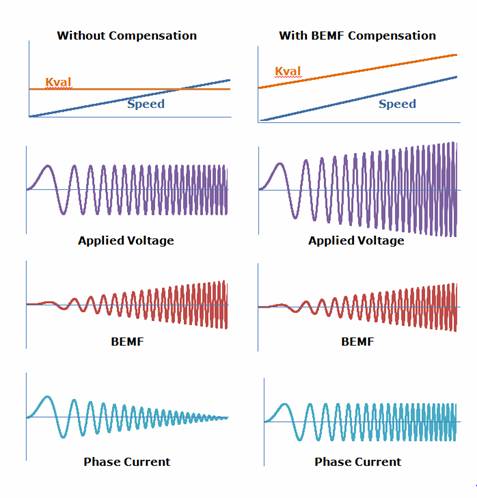
ͼ 4:��BEMF������·����BEMF������·�������
Ϊ����BEMF���ӶԵ�����Ӱ�죬�ò�Ʒ��KVALϵ��������һ������BEMF�������������ϣ������� KVAL��ʼ����ֵ������һ������ֵ���Ե���BEMF��Ӱ�졣����BEMFֱ����ת�ٳ����ȣ�����������ֵ������һ��б�ʣ��������б�ʺ͵���ת��������ʵʱ����ֵ���ò�Ʒ�ṩ��ͬ������ֵ����һ��ֵ��һ����ֵ�������ڵ������ת�ٿ�ʼ������ת��ֱ���ཻת�ٲ���INT_SPEED���õĽϸ��ٶ�Ϊֹ�����ཻ�ٶ�֮�ϣ��������������ӵ�б�ʵ�����б�ʣ�һ�����ں�����ת�ͼ��ٶȣ���һ�������ڼ�����ת���� BEMF����ֵ�����ʵ�ʱ����ֵ�����ڵ��ȫ��ת�ٷ�Χ�ڱ��ֺ㶨����ͼ4��ʾ��ͼ6�����˵�һ�����������תʱ��ʵ�ʵ������Ρ�
ͼ5: BEMF��������
ͼ 6:��BEMF�������ܵ������
��Դ�����������
����ĵ�Դ��ѹ�����������������Ӱ�����������Ҫ���ء���Ϊ���������õ�ѹ���Ʒ�ʽ�������ռ�ձȽ��п��ƣ�����������Ҫ��֮���κ�һ�������仯������Ӱ���������
�����û����ѹ��Դʱ���ڴӵ�Դ�����������·�ĵ�ѹ�ϻ���ִ�����������ѹ�����ŵ�Դ��ѹ�仯���������Ҳ�Შ���������Դ�ϵ�����
����Ķ�:
- ...��ͼ����������DZ��屳��ij��漶��ȫ���Ҫ��
- ...��ʹ���а�ȫ���ϵ�����洢������ȫ������ϵͳ
- ...������ƫ�ò�����Դ������Ľ��½�չ��Ӧ��
- ...�����¿�˹����ijƷ�����ܲ���������������ƪ
- ...�����ߵ���ʽ�¶ȼ��������ϵͳ�����ŵ���ʧ���Ӱ��(��)
- ...�����ߵ���ʽ�¶ȼ��������ϵͳ�����ŵ���ʧ���Ӱ��
- ...��RTD����ϵͳ�����ŵ���ʧ���Ӱ��
- ...������BR/EDR �� Bluetooth Smart��ʮ����Ҫ����
- ...�� ��о���������Уδ�������˻�������ƴ���������ʽ����
- ...�� ̽�صڶ�������ɽӥ�����¡����������鼼����̳��
- ...�� ��2018�й��뵼����̬����ᡱ�ڽ���ʡ��������
- ...�� �������¹滮��CITE 2019�t���ǻ�δ��
- ...�� ��������������TI���ײ������������ڴ�������ܵ�����
- ...�� �ⷨ�뵼�壨ST����Cinemo��Valens��CES 2018չ��������ʾ������Ϣ���ֽ������
- ...�� �������ɵ�·��ҵ���·�չ�߷���̳�����ھ��ٿ�
- ...�� ������ǿ�Ƴ���PCIM����2017չ
- ...�� GPGPU����������й�оƬ��ҵ�Ŀհش�
- ...�� ��������Ʒ�����Wi-Fi���ӵ��ĸ��ؼ�����
- ...�� �������й�MEMS���ܴ�������ҵ��չ��ἴ���ڰ��������Ļ
- ...�� IAICר��������й�о��Ӧ�ô��£���Ϣ��ȫ�߷���̳��������
- ...�� ���ܿ�����Դǯλ����
- ...�� ���5G���ײ�OTA ���Լ���
- ...�� ����г����������ƶ�Molex��ǿ��������ķ�չ
- ...�� �й���ɫ�������˳�������ٿ��ڼ� ����ѧ���ù�̽��ɫ��չ��ģʽ
- ...�� Efinix® ȫ������AI��Ե���㣬�ɹ��Ƴ�Trion™ T20 FPGA��Ʒ, ͬʱ����Ʒ��չ����ʮ������Ԫ��T200 FPGA
- ...�� Ӣ������������ᣬ�����ǻ�������
- ...�� �����Ʒ�������������ֻᱱ������Դר���ɹ�����
- ...�� Manz���ǿƼ�����뵼������ Ϊ��弶�ȳ��ͷ�װ�ṩ��ѧʪ�Ƴ̡�Ϳ��������Ӧ�õ������豸�������
- ...�� �е���BITRODE������ز���ϵͳ˳��������������Դ
- ...�� �е���FTFϵ�е�ز���ϵͳ�б걱������Դ�����ɷ�����˾
- ...�� �е����ʸ�ѹ��Դ����ʽ����ϵͳ�ɹ������е���è
- ...�� �е������ڵ綯�������ؼ������������ֻ��������Ƚ���������