�����˼�������ϵ�У��滮�뵼��
����
�����ƶ������˵Ĺ滮�뵼������������Ŀ�ĵľ����ƶ���ִ����ʹϵͳʵ�ֽϸ���Ŀ�ꡣ�������Ƿ�ʤ�ε�������������ͨ������������֤����·���滮�ͱ��ϡ�
Ŀ¼
������ͼ��Ŀ�ĵ�����µ�·���滮ָ���ǻ�����ͨ���켣ʶ���н���Ŀ�ĵص�������·���滮��������Ҫ����������������Ϊ�����˱��������������ڵ���Ŀ�ĵ�ǰ��·��������н���
·���滮�ɷ�Ϊ�����֣��������㷨��·���滮��Ա���Ƚ������˻���ת��Ϊ�ʺ�·���滮����ʽ��һЩ���õļ������������ Voronoiͼ������������IJ�����·���滮�㷨ͨ�������ڼ����������ÿռ�ı����ȻijЩ��������ʺ��ض����ͼ1չʾ��LabVIEW�л��Ƶ� Voronoiͼ��

ͼ1. LabVIEW�е�Voronoiͼ
���ڶ��������ת��Ϊͼ������ʼ�ڵ��Ŀ��ڵ�֮���·����ͨ��ͼ�����㷨�����㡣ͼ�����㷨���������ѧ������⣬Ȼ ���������㷨Ҫ��������ͼ�ϵ�ÿ���ڵ㣬�Դ���������ʼ�ڵ��Ŀ��ڵ��Ľ϶�·������������ͨͼ��˵������ÿ���ڵ���������ģ���Voronoi ͼ�������ڽ���ͨͼ��˵���㿪��Ѹ�ٱ�����������ͼ��
·���滮��Ա������Ԥ��֪���Ļ����ϰ�����·��ִ���п������ڵ�ͼ���Ȼ�̬���������أ���ɻ�������ʵ��������ֵ��Ԥ��ֵ֮����ڲ��졣��ˣ������˱����ܸ�����ʵ��������ֵʵʱ�ı��˶�·���������DZ���������Ҫ��ԭ��һЩͨ�õı��Ϸ�������Bug�㷨��VFH�㷨��
һ��ֱ�ӵ�·���滮�������ػ������н�·����ÿ���ϰ����������С�Bug1�㷨�У���������ȫ���ϰ����������ƣ����ڵ� ����Ŀ��ص�Ͻ��ĵ�ʱ���롣���ַ���Ч�ʵͣ�����ȷ�������˵����κοɵ����Ŀ�ꡣBug2�㷨�У������������ϰ��������н������ﵽ��ֱ��Ŀ��ص�� λ��ʱ���̷��롣Bug2�㷨���������˻����˵��н�·�̣����Բ��ǽ��ŵġ�
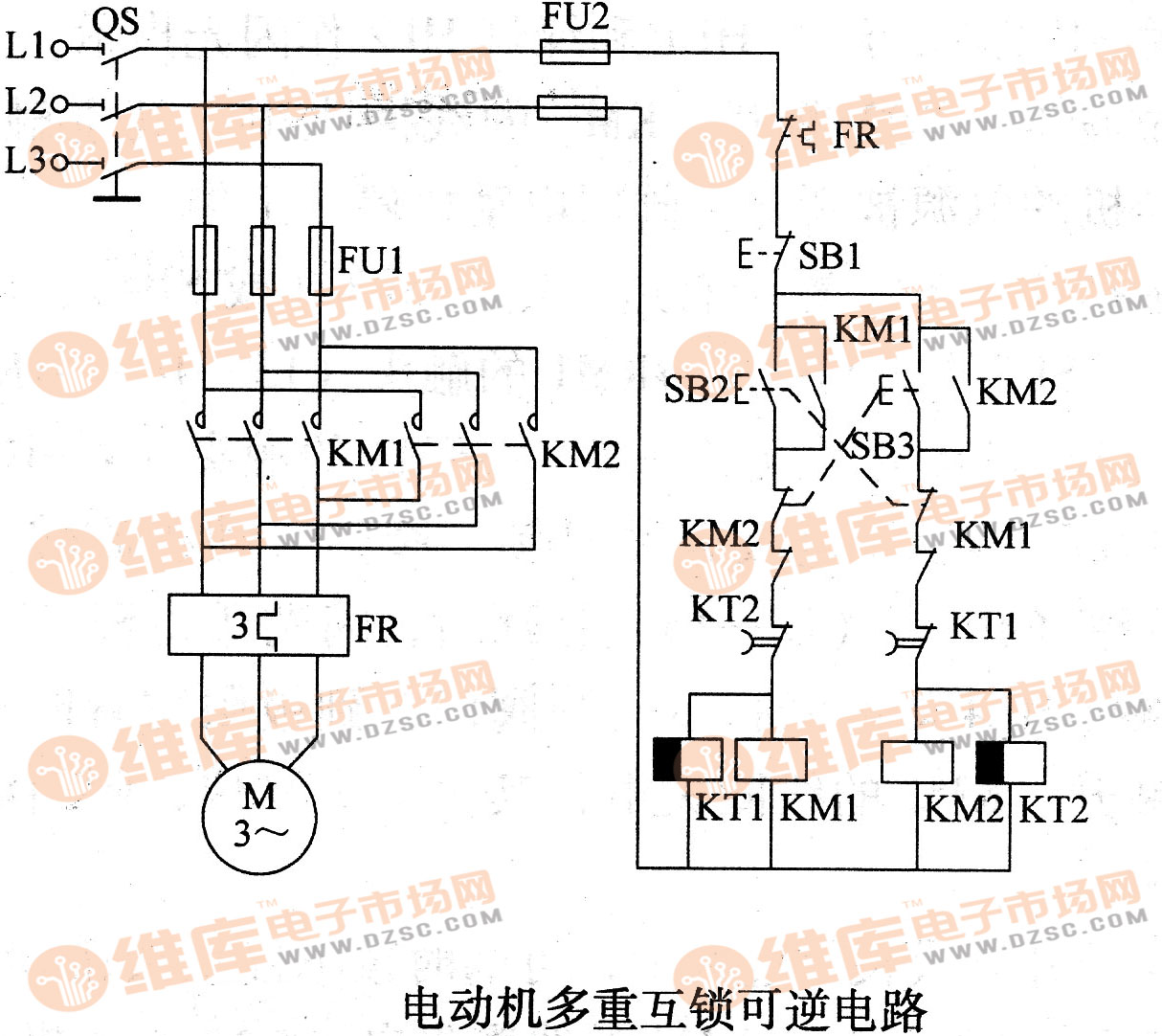
Bug�㷨��һ�������ǻ�����ÿһ�̵���Ϊһ��Ϊ�������Ͻ�ʱ�̶����ĺ�������Ϳ��ܵ��»����˵�˲ʱ��������������Ϊ �ȶ��ı��������ṩ�㹻����Ϣ��VFH����ͨ��������������Χ�����ĵ�ͼ�˷��˸����ơ��ڱ���ʱ���ɼ�������״ͼ��ȷ��ת�����ȣ�ʶ���ܹ��û�����ͨ�� ������ͨ����Ȼ��ִ�п���Ŀ�귽���ַ����ǰһ�̷���Ĵ��ۺ�����
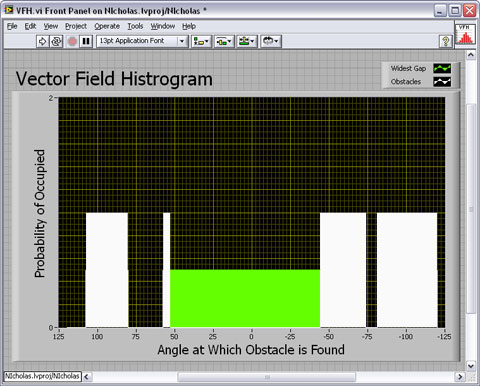
ͼ2. LabVIEW VI��ǰ�������VFH�����㷨
ͨ��LabVIEW�û���ѡ�����Ч����������㷨����ʹ�����ù������������������ı�����д���㷨���̳д��������е������㷨�����������˿�����ɵ���LabVIEW��LabVIEW Real-Time��LabVIEW FPGA�С�
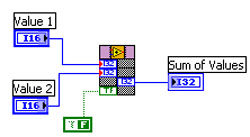
LabVIEW�û������õ��ÿ⺯���ڵ���Windows������ʵʱǶ��ʽ�������е���DLL���ýڵ�������LabVIEW�д�������רΪLabVIEW��д�����п���¿�Ľӿڡ���ͼ�ĵ��ÿ⺯���ڵ�����4���ֽڵĸ��������������ƽ��ֵ��

ͼ3. ���ú�����ڵ����LabVIEW�����ڵ���̳д���
Ҳ�ɲ��ģ�
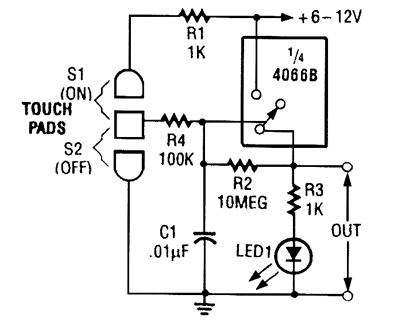
��ʽ�ڵ������LabVIEW��LabVIEW Real-Time�е��㷨��������ʽ�ڵ���һ�ּĻ����ı����ԵĽڵ㣬������LabVIEW��ͼ��ִ����ѧ�������û����������κ��ⲿ�����Ӧ�ã� Ҳ�������ӵͼ��㷨������������ʽ�����˻����ı��ĵ�ʽ�����ʽ�ڵ㻹�ܽ��ܻ����ı����if������whileѭ����forѭ����doѭ������Щ����C �����û�����Ϥ�ġ�
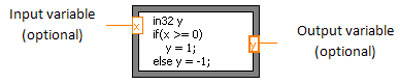
ͼ4. ��ʽ�ڵ��������C���Ե��
��ʽ�ڵ���ڰ������������dz����ӵĵ�ʽ���Լ�ʹ�����еĻ����ı��Ĵ�����˵�����á��û��ɽ����еĻ����ı��Ĵ��븴�ơ�ճ������ʽ�ڵ��У����������´���ͼ�δ�����鷳��
Ҳ�ɲ��ģ�
ָ�ϣ�Mathscript��ʽ�ڵ�
��ϰ��Mathscript��ʽ�ڵ�
��Ƶ��Mathscript��ʽ�ڵ�
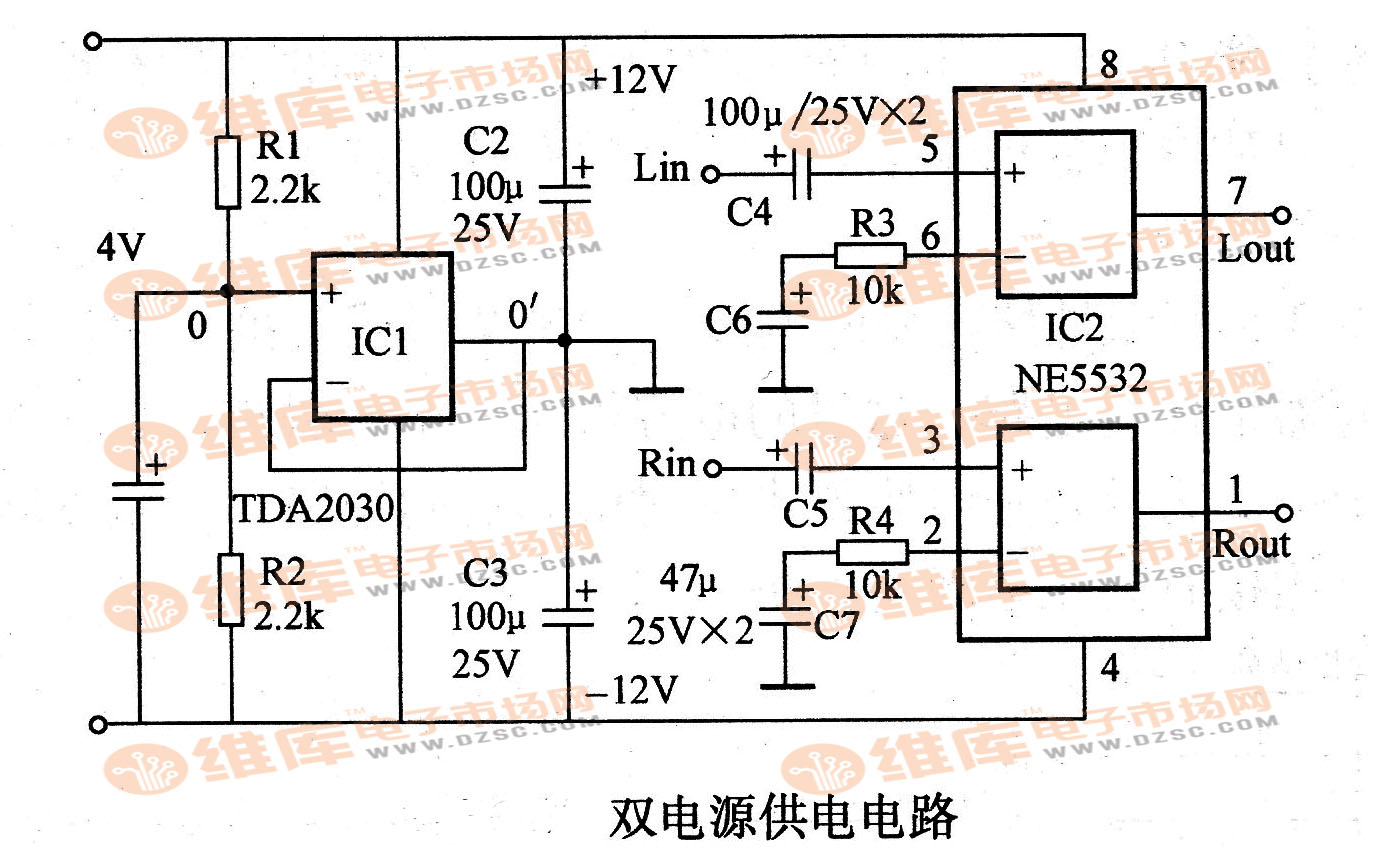
HDL�ӿڽڵ������û���LabVIEW FPGA���ۺ�Ӳ����������(HDL)д���㷨��Ӧ�á��û�����ֱ����HDL�ӿڽڵ�������HDL���룬�������ⲿHDL�ļ�����ͼ�������У�HDL����ڵ������VHDL���룬������32����������Ӳ����ؽ����
ͼ5. HDL�ڵ�����������LabVIEW FPGA�е���HDL����
Ҳ�ɲ��ģ�
HDL�ӿڽڵ�FAQ
ʹ��HDL�ӿڽڵ��� FPGA VI�е���HDL����
ʹ��HDL�ӿڽڵ���LabVIEW FPGA���ۺ�IP��
�˽������ڻ����˼������ɲ��������˼�������ϵ����ҳni.com/zone��
ĿǰNI��ȫ���Ƴ�LabVIEW Robotics 2009�������������������ϵͳ����ơ�ԭ���뷢����������Ϣ�����www.ni.com/robotics/zhs������Ķ�:
- ...2015/02/12 14:43����������Ⱥģ���ij���������Խ�Ϲ滮
- ...2015/01/21 14:59�������Ƴ�դ���ƶ������˱���·���滮
- ...2014/03/17 15:58�����л������ƶ���������̬���Ʒ���
- ...2014/01/22 11:03�������ƶ������˵Ķ�����ݲɼ�ϵͳ
- ...2013/10/16 14:41��EC3-1816CLD2NA����������������Ŀ�е�Ӧ��
- ...2013/10/10 16:09����Դɢ��任��˫���ƶ�����������ң����
- ...��ͼ����������DZ��屳��ij��漶��ȫ���Ҫ��
- ...��ʹ���а�ȫ���ϵ�����洢������ȫ������ϵͳ
- ...������ƫ�ò�����Դ������Ľ��½�չ��Ӧ��
- ...�����¿�˹����ijƷ�����ܲ���������������ƪ
- ...�����ߵ���ʽ�¶ȼ��������ϵͳ�����ŵ���ʧ���Ӱ��(��)
- ...�����ߵ���ʽ�¶ȼ��������ϵͳ�����ŵ���ʧ���Ӱ��
- ...��RTD����ϵͳ�����ŵ���ʧ���Ӱ��
- ...������BR/EDR �� Bluetooth Smart��ʮ����Ҫ����
- ...�� ��о���������Уδ�������˻�������ƴ���������ʽ����
- ...�� ̽�صڶ�������ɽӥ�����¡����������鼼����̳��
- ...�� ��2018�й��뵼����̬����ᡱ�ڽ���ʡ��������
- ...�� �������¹滮��CITE 2019�t���ǻ�δ��
- ...�� ��������������TI���ײ������������ڴ�������ܵ�����
- ...�� �ⷨ�뵼�壨ST����Cinemo��Valens��CES 2018չ��������ʾ������Ϣ���ֽ������
- ...�� �������ɵ�·��ҵ���·�չ�߷���̳�����ھ��ٿ�
- ...�� ������ǿ�Ƴ���PCIM����2017չ
- ...�� GPGPU����������й�оƬ��ҵ�Ŀհش�
- ...�� ��������Ʒ�����Wi-Fi���ӵ��ĸ��ؼ�����
- ...�� �������й�MEMS���ܴ�������ҵ��չ��ἴ���ڰ��������Ļ
- ...�� IAICר��������й�о��Ӧ�ô��£���Ϣ��ȫ�߷���̳��������
- ...�� ���ܿ�����Դǯλ����
- ...�� ���5G���ײ�OTA ���Լ���
- ...�� ����г����������ƶ�Molex��ǿ��������ķ�չ
- ...�� �й���ɫ�������˳�������ٿ��ڼ� ����ѧ���ù�̽��ɫ��չ��ģʽ
- ...�� Efinix® ȫ������AI��Ե���㣬�ɹ��Ƴ�Trion™ T20 FPGA��Ʒ, ͬʱ����Ʒ��չ����ʮ������Ԫ��T200 FPGA
- ...�� Ӣ������������ᣬ�����ǻ�������
- ...�� �����Ʒ�������������ֻᱱ������Դר���ɹ�����
- ...�� Manz���ǿƼ�����뵼������ Ϊ��弶�ȳ��ͷ�װ�ṩ��ѧʪ�Ƴ̡�Ϳ��������Ӧ�õ������豸�������
- ...�� �е���BITRODE������ز���ϵͳ˳��������������Դ
- ...�� �е���FTFϵ�е�ز���ϵͳ�б걱������Դ�����ɷ�����˾
- ...�� �е����ʸ�ѹ��Դ����ʽ����ϵͳ�ɹ������е���è
- ...�� �е������ڵ綯�������ؼ������������ֻ��������Ƚ���������